1. Tujuan[back]
Agar ketika air dalam tanki sudah penuh terisi, maka pompa air akan mati secara otomatis.
2. Komponen[back]
gambar 1. Buzzer

2. LCD (Liquid Crystal Display)Buzzer adalah sebuah komponen elektronika yang berfungsi untuk mengubah getaran listrik menjadi getaran suara. Pada dasarnya, setiap buzzer memerlukan input berupa tegangan listrik yang kemudian diubah menjadi getaran suara atau gelombang bunyi yang memiliki frekuensi berkisar antara 1 - 5 KHz. Jenis buzzer elektronika yang sering digunakan dan ditemukan dalam rangkaian adalah buzzer yang berjenis Piezoelectric (Piezoelectric Buzzer). Hal itu karena Piezoelectric Buzzer memiliki berbagai kelebihan diantaranya yaitu lebih murah, relatif lebih ringan dan lebih mudah penggunaannya ketika diaplikasikan dalam rangkaian elektronika.
Efek Piezoelektrik (Piezoelectric Effect) ditemukan pertama kali oleh dua orang ilmuwan Fisika pada tahun 1880 bernama Pierre Curie dan Jacques Curie yang berasal dari kebangsaan Perancis. Penemuan tersebut kemudian dikembangkan oleh sebuah perusahaan Jepang menjadi Piezoelectric Buzzer dan mulai populer digunakan pada tahun 1970-an.
Dalam rangkaian elektronika, piezoelectric buzzer dapat digunakan pada tegangan listrik sebesar 6 volt hingga 12 volt dan dengan tipikal arus sebesar 25 mA. Buzzer yang termasuk dalam keluarga Transduser ini sering disebut juga dengan Beeper.
Pada dasarnya, prinsip kerja dari buzzer elektronika hampir sama dengan loud speaker dimana buzzer juga terdiri dari kumparan yang terpasang secara diafragma. Ketika kumparan tersebut dialiri listrik maka akan menjadi elektromagnet sehingga mengakibatkan kumparan tertarik ke dalam ataupun ke luar tergantung dari arah arus dan polaritas magnetnya. Karena kumparan dipasang secara diafragma maka setiap kumparan akan menggerakkan diafragma tersebut secara bolak-balik sehingga membuat udara bergetar yang akan menghasilkan suara.
Namun dibandingkan dengan loud speaker, buzzer elektronika relatif lebih mudah untuk digerakkan. Sebagai contoh, buzzer elektronika dapat langsung diberikan tegangan listrik dengan taraf tertentu untuk dapat menghasilkan suara. Hal ini tentu berbeda dengan loud speaker yang memerlukan rangkaian penguat khusus untuk menggerakkan speaker agar menghasilkan suara yang dapat didengar oleh manusia.
gambar 2. LCD
gambar 3. Lapisan LCD
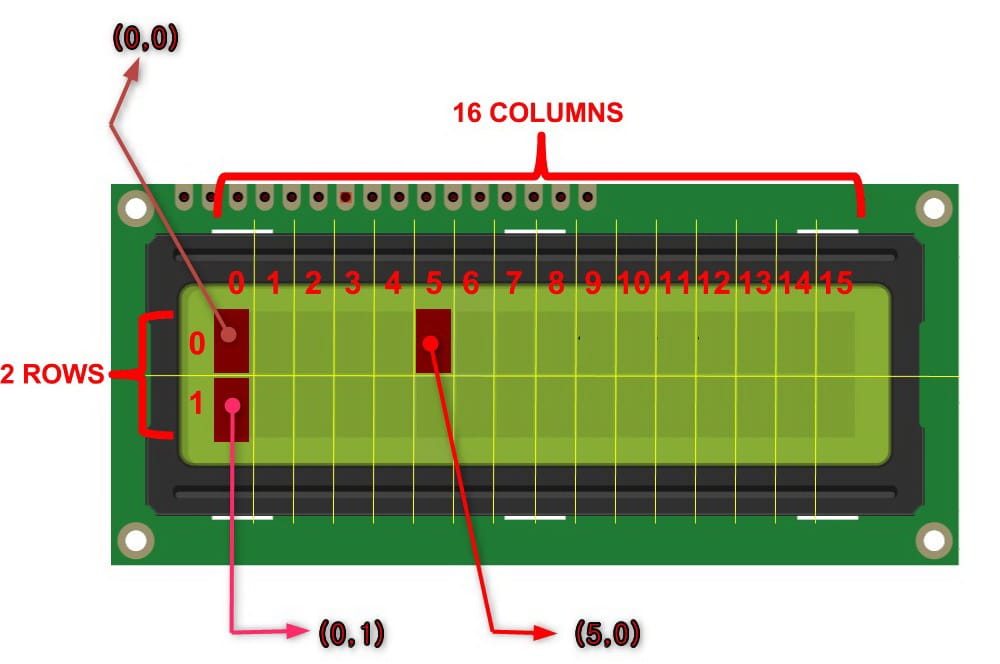

Liquid Crystal Display (LCD) adalah sebuah peralatan elektronik yang berfungsi untuk menampilkan output sebuah sistem dengan cara membentuk suatu citra atau gambaran pada sebuah layar.
Secara garis besar komponen penyusun LCD terdiri dari kristal cair (liquid crystal) yang diapit oleh 2 buah elektroda transparan dan 2 buah filter polarisasi (polarizing filter).
Keterangan:1. Film dengan polarizing filter vertical untuk memolarisasi cahaya yangmasuk.2. Glass substrate yang berisi kolom-kolom elektroda Indium tin oxide (ITO).3. Twisted nematic liquid crystal (kristal cair dengan susunan terpilin).4. Glass substrate yang berisi baris-baris elektroda Indium tin oxide (ITO).5. Film dengan polarizing filter horizontal untuk memolarisasi cahaya yang masuk.6. Reflektor cahaya untuk memantulkan cahaya yang masuk LCD kembali ke mata pengamat.
Sebuah citra dibentuk dengan mengombinasikan kondisi nyala dan mati dari pixel-pixel yang menyusun layar sebuah LCD. Pada umumnya LCD yang dijual di pasaran sudah memiliki integrated circuit tersendiri sehingga para pemakai dapat mengontrol tampilan LCD dengan mudah dengan menggunakan mikrokontroler untuk mengirimkan data melalui pin-pin input yang sudah tersedia.
3. LED (Light Emitting Diode)
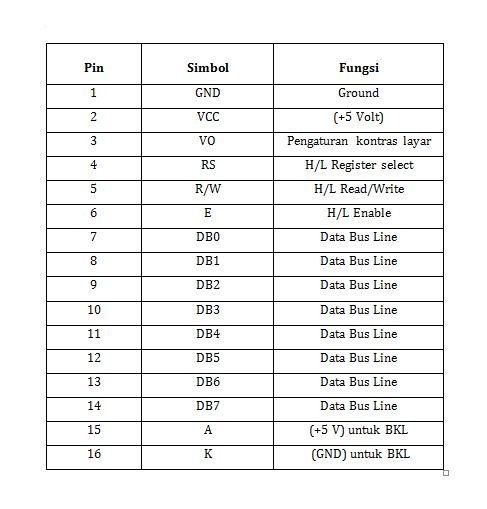
gambar 4. pin LCD
4. ArduinoLED adalah suatu semikonduktor yang memancarkan cahaya, LED mempunyai kecenderungan polarisasi. LED mempunyai kutub positif dan negatif (p-n) dan hanya akan menyala bila diberikan arus maju. Ini dikarenakan LED terbuat dari bahan semikonduktor yang hanya akan mengizinkan arus listrik mengalir ke satu arah dan tidak ke arah sebaliknya. Bila LED diberikan arus terbalik, hanya akan ada sedikit arus yang melewati LED. Ini menyebabkan LED tidak akan mengeluarkan emisi cahaya.LED terdiri dari sebuah chip semikonduktor yang di doping sehingga menciptakan junction P dan N. Yang dimaksud dengan proses doping dalam semikonduktor adalah proses untuk menambahkan ketidakmurnian (impurity) pada semikonduktor yang murni sehingga menghasilkan karakteristik kelistrikan yang diinginkan. Ketika LED dialiri tegangan maju atau bias forward yaitu dari Anoda (P) menuju ke Katoda (K), Kelebihan Elektron pada N-Type material akan berpindah ke wilayah yang kelebihan Hole (lubang) yaitu wilayah yang bermuatan positif (P-Type material). Saat Elektron berjumpa dengan Hole akan melepaskan photon dan memancarkan cahaya monokromatik (satu warna).
gambar 5. LED

5. Motor DCArduino adalah kit elektronik atau papan rangkaian elektronik open source yang di dalamnya terdapat komponen utama yaitu sebuah chip mikrokontroler dengan jenis AVR dari perusahaan Atmel. Arduino yang kita gunakan dalam praktikum ini adalah Arduino Uno yang menggunakan chip AVR ATmega 328P. Dalam memprogram Arduino, kita bisa menggunakan komunikasi serial agar Arduino dapat berhubungan dengan komputer ataupun perangkat lain.
Adapun spesifikasi dari Arduino Uno ini adalah sebagai berikut :
gambar 6. Arduino
Microcontroller ATmega328P
Operating Voltage 5 V
Input Voltage (recommended) 7 – 12 V
Input Voltage (limit) 6 – 20 V
Digital I/O Pins 14 (of which 6 provide PWM output)
PWM Digital I/O Pins 6
Analog Input Pins 6
DC Current per I/O Pin 20 mA
DC Current for 3.3V Pin 50 mA
Flash Memory 32 KB of which 0.5 KB used by bootloader
SRAM 2 KB
EEPROM 1 KB
Clock Speed 16 MHz
BAGIAN-BAGIAN ARDUINO UNO
POWER USB
Digunakan untuk menghubungkan Papan Arduino dengan komputer lewat koneksi USB.
POWER JACK
Supply atau sumber listrik untuk Arduino dengan tipe Jack. Input DC 5 - 12 V.
Crystal Oscillator
Kristal ini digunakan sebagai layaknya detak jantung pada Arduino.
Jumlah cetak menunjukkan 16000 atau 16000 kHz, atau 16 MHz.
Reset
Digunakan untuk mengulang program Arduino dari awal atau Reset.
Digital Pins I / O
Papan Arduino UNO memiliki 14 Digital Pin. Berfungsi untuk memberikan nilai logika ( 0 atau 1 ). Pin berlabel " ~ " adalah pin-pin PWM ( Pulse Width Modulation ) yang dapat digunakan untuk menghasilkan PWM.
Analog Pins
Papan Arduino UNO memiliki 6 pin analog A0 sampai A5. Digunakan untuk membaca sinyal atau sensor analog seperti sensor jarak, suhu dsb, dan mengubahnya menjadi nilai digital.
LED Power Indicator
Lampu ini akan menyala dan menandakan Papan Arduino mendapatkan supply listrik dengan baik.
BAGIAN-BAGIAN PENDUKUNG
RAM
RAM (Random Access Memory) adalah tempat penyimpanan sementara pada komputer yang isinya dapat diakses dalam waktu yang tetap, tidak memperdulikan letak data tersebut dalam memori atau acak. Secara umum ada 2 jenis RAM yaitu SRAM (Static Random Acces Memory) dan DRAM (Dynamic Random Acces Memory)
ROM
ROM (Read-only Memory) adalah perangkat keras pada computer yang dapat menyimpan data secara permanen tanpa harus memperhatikan adanya sumber listrik. ROM terdiri dari Mask ROM, PROM, EPROM, EEPROM.

gambar 7. motor DC Motor dc atau motor listrik ialah suatu perangkat yang bisa merubah energi listrik menjadi energi kinetik atau gerakan. Dalam istilah lain, motor dc juga sering disebut sebagai motor arus searah.Sesuai dengan namanya, dc motor memang mempunyai dua terminal yang memerlukan tegangan arus searah untuk bisa menggerakannya.
Sebuah motor dc memiliki dua bagian utama yaitu stator dan rotor. Stator merupakan bagian motor yang tidak bisa berputar, terdiri dari rangka dan kumparan- kumparan medan.
Sementara rotor adalah bagian yang dapat berputar, terdiri dari kumparan jangkar. Kedua bagian utama ini dikelompokkan lagi menjadi berbagai komponen penting seperti :1. Kerangka magnet (yoke)2. Kutub motor (poles)3. Kumparan medan magnet (field winding)4. Kumparan jangkar (armature winding)5. Komutator (commutator)6. Sikat arang (brushes)Untuk bisa bergerak, pada prinsip kerja motor dc menggunakan fenomena elektromagnet.Saat arus listrik diberikan ke kumparan, permukaannya yang bersifat utara akan langsung bergerak menghadap ke magnet kutub selatan.Selanjutnya kumparan magnet selatan akan bergerak menghadap ke magnet kutub utara.Karena kutub utara magnet bertemu dengan kutub selatan magnet dan sebaliknya, maka terjadilah saling tarik menarik yang menyebabkan pergerakan kumparan berhenti.Untuk bisa menggerakannya kembali, tepat saat kutub kumparan berhadapan dengan kutub magnet sehingga arah arus kumparan dibalik.Pada kondisi tersebut, kutub utara kumparan berubah menjadi kutub selatan dan kutub selatan berubah menjadi kutub utara.Jika perubahan ini terjadi, kutub selatan akan berhadapan dengan kutub selatan dan kutub utara akan berhadapan dengan kutub utara menyebabkan adanya tolak menolak sehingga otomatis kumparan bergerak memutar sampai akhirnya kutub utara kumparan berhadapan kembali dengan kutub selatan dan sebaliknya.Siklus ini akan terus terjadi berulang-ulang sampai arus listrik pada kumparan diputuskan.

6. Water Level Sensor
gambar 8. water level sensor Jadi seperti yang terlihat di gambar modul ini sangat simple bentuknya, pada keterangan power led itu adalah lampu yang akan menyala apabila modul Water Level Sensor ini diberi tegangan 5V (tegangan kerja sensor) lalu disana juga terdapat beberapa jalur yang sudah ditandai, Jalur berwarna Hijau adalah Jalur Sensor Sedangkan Jalur berwarna Biru adalah Jalur Tegangan / Power nya. Water Level Sensor ini Prinsip Kerjanya sama seperti Potensiometer yang menggunakan Variable Resistor dan itu artinya apabila air di permukaan jalur sedikit maka resistansi akan tinggi yang menyebabkan tegangan akan terbaca dengan nilai kecil, namun apabila air di permukaan jalur tinggi maka resistansi akan rendah sehingga nilai yang terbaca akan tinggi.
Jumlah Pin pada Sensor ini berjumlah 3 Yaitu :
1. Pin Negatif (-)
2. Pin Positif (+)
3. Pin Data (S)
Pin negatif (-) akan langsung berhubungan dengan Ground (GND) Arduino Nano sedangkan Pin Tegangan (+) akan langsung berhubungan dengan output tegangan 5V Arduino Nano sehingga nanti sensor tersebut akan bekerja sebagaimana mestinya, Namun jangan lupakan Pin Data (S) di sensor yang berfungsi untuk mengirimkan data ke Arduino Nano apabila terdapat air di permukaan jalur, disini pin Data (S) menggunakan Pin Analog dari Arduino dikarenakan pin analog lah yang dapat membaca masukan sinyal dari Water Level Sensor sedangkan pin Digital tidak dapat melakukanya.

7. Sound Detector
gambar 9. sound detector Sound Detector adalah sensor yang cara kerjanya yaitu merubah besaran suara menjadi besaran listrik. Sinyal yang masuk akan di olah sehingga akan menghasilkan satu kondisi yaitu kondisi 1 atau 0. Sensor suara banyak digunakan dalam kehidupan sehari-hari, Contoh Pengaplikasian sensor ini adalah yang bekerja pada system robot. Suara yang diterima oleh microfon akan di transfer ke pre amp mic, fungsi pre amp mic ini adalah untuk memperkuat sinyal suara yang masuk kedalam komponen.Setelah sinyal suara diterima oleh preamp mic, kemudian di kirim lagi ke rangkaian pengkonfersi yang mana rangkaian ini berfungsi untuk merubah sinyal suara yang berbentuk sinyal digital menjadi sinya analog agar bisa dibaca oleh mikrokontroler. Jika sinyal tersebut diterima oleh mikro kontroler maka akan diolah sesuai dengan program yang dibuat, apakah robot akan berjalan atau berhenti.Suara yang masuk direkam oleh komponen kemudian akan disimpan oleh memory. Sebagai contoh jika kita bertepuk tangan 1 kali maka akan dikenali sebagai kondisi 1 atau on sehingga robot dapat berjalan. Jika bertepuk tangan 2 kali maka robot akan mati atau mendapat sinyal kondisi 0. Penggunaan sinyal tergantung dari user bagaimana dia menggunakannya.Kesensitifan sensor suara dapat diatur, semakin banyak condensator yang digunakan pada pre amp maka akan semakin baik daya sensitive dari sensor suara tersebut. Begitu juga pada saat penggunaan suara harus dalam kondisi tertentu, karena jika terdapat suara lain yang masuk maka akan tidak dikenali oleh sensor, begitu pula frekuensi yang digunakan harus sesuai pada saat kita menginput suara awal dan input suara pada saat menjalankan program.

UART (Universal Asynchronous Receiver-Transmitter) adalah bagian perangkat keras komputer yang menerjemahkan antara bit-bit paralel data dan bit-bit serial. UART biasanya berupa sirkuit terintegrasi yang digunakan untuk komunikasi serial pada komputer atau port serial perangkat periperal.
Cara Kerja Komunikasi UART
Gambar 10. Cara Kerja Komunikasi UART
Data dikirimkan secara paralel dari data bus ke UART1. Pada UART1 ditambahkan start bit, parity bit, dan stop bit kemudian dimuat dalam satu paket data. Paket data ditransmisikan secara serial dari Tx UART1 ke Rx UART2. UART2 mengkonversikan data dan menghapus bit tambahan, kemudia di transfer secara parallel ke data bus penerima.

9. Transistor
Secara umum, Transistor dapat digolongkan menjadi dua keluarga besar yaitu Transistor Bipolar dan Transistor Efek Medan (Field Effect Transistor). Perbedaan yang paling utama diantara dua pengelompokkan tersebut adalah terletak pada bias Input (atau Output) yang digunakannya. Transistor Bipolar memerlukan arus (current) untuk mengendalikan terminal lainnya sedangkan Field Effect Transistor (FET) hanya menggunakan tegangan saja (tidak memerlukan arus). Pada pengoperasiannya, Transistor Bipolar memerlukan muatan pembawa (carrier) hole dan electron sedangkan FET hanya memerlukan salah satunya.
 |
| gambar 11. transistor |
Relay adalah Saklar (Switch) yang dioperasikan secara listrik dan merupakan komponen Electromechanical (Elektromekanikal) yang terdiri dari 2 bagian utama yakni Elektromagnet (Coil) dan Mekanikal (seperangkat Kontak Saklar/Switch). Relay menggunakan Prinsip Elektromagnetik untuk menggerakkan Kontak Saklar sehingga dengan arus listrik yang kecil (low power) dapat menghantarkan listrik yang bertegangan lebih tinggi. Sebagai contoh, dengan Relay yang menggunakan Elektromagnet 5V dan 50 mA mampu menggerakan Armature Relay (yang berfungsi sebagai saklarnya) untuk menghantarkan listrik 220V 2A
 |
| gambar 12. Relay |
3. Rangkaian Simulasi[back]
 |
| gambar 11. Rangkaian sebelum di run |
 |
| gambar 12. kondisi mengisi air |
 |
| gambar 13. kondisi air penuh |
Prinsip KerjaPada praktikum kali ini kami menggunakan aplikasi tentang pengontrol tinggi air pada tangki air menggunakan water sensor(Sensor analog) dan sound detector (sensor digital) dengan menggunakan komunikasi UART (pin Tx dan pin Rx). Water sensor akan aktif jika sensor mendeteksi ketinggian air sesuai dg batas yg diberikan. Sehingga nilai resistansi sensor ini akan semakin rendah jika air yg di deteksi semakin meningkatkan. Sedangkan sound detector ini akan aktif ketika mendapat input suara.Output dari water sensor akan dijadikan input pada aduino master pada pin A0 dan output dari water sensor akan dijadikan input pada aduino master pada pin 4.
Jika water Sensor mendeteksi ketinggian air yg sudah di atur pada program master, maka sensor tersebut akan aktif sehingga nanti akan mengakibatkan LED (pin 13) dan buzzer (pin 12 ) pada arduino slave akan ON. Karna buzzer ON maka akan mengakibatkan sound detector akan ON sehingga nanti output nya akan menjadi input pada arduino master dan akan mengakibatkan pin 3 High, sehingga transistor akan aktif (pin 3 ON) dan rellay juga akan aktif dan menyebabkan rangkaian pada pompa air akan terputus dan pompa pun akan berhenti berputar dan pada LCD ditampilkan tulisan "Warning Air Penuh". Jika water Sensor mendeteksi ketinggian maksimal air,maka pompa akan terus berputar dan pada LCD akan ditampikan tulisan "Aman Air Ada".Artinya jika ke dua sensor tersebut aktif maka akan menyebabkan pompa akan off secara otomatis. Dan jika kondisi input sensor selain yg sebelumnya ,maka pompa akan terus berputar memompa air sampai ketinggian air pada tangki sudah mencapai batas maksimal.


//MASTER#include <LiquidCrystal.h>#define water A0#define soundSensor 4LiquidCrystal lcd(13,2,11,10,9,8);int nilaiSensorAir;int nilaiSensorSuara;int tinggiAir;void setup(){pinMode(water,INPUT);pinMode(soundSensor,INPUT);lcd.begin(16,2);Serial.begin(9600);}void loop(){nilaiSensorAir= analogRead(water);nilaiSensorSuara= digitalRead(soundSensor);if(nilaiSensorAir >= 200 && nilaiSensorSuara == HIGH ){Serial.print("1");lcd.clear();lcd.setCursor(0,0);lcd.print("WARNING");lcd.setCursor(0,1);lcd.print("AIR PENUH");delay(500);}else{Serial.print("2");lcd.clear();lcd.setCursor(0,0);lcd.print("AMAN");lcd.setCursor(0,1);lcd.print("AIR ADA ");delay(500);}}//SLAVE#define led 13#define buzzer 12#define rellay 3void setup() //Semua kode dalam fungsi ini dieksekusi sekali{pinMode(13,OUTPUT);pinMode(12,OUTPUT);pinMode(3,OUTPUT);Serial.begin(9600);}void loop(){if(Serial.available()>0){int data = Serial.read();if(data=='1'){digitalWrite(13,HIGH);digitalWrite(12,HIGH);digitalWrite(3,HIGH);}else{digitalWrite(13 ,LOW);digitalWrite(12 ,LOW);digitalWrite(3,LOW);}}}
6. Video[back]
7. Analisa[back]
Pada rangkaian simulasi pengontrol ketinggian air ini, bertujuan untuk menghindari adanya kelupaan dalam mematikan air, ketika tangki air sudah terisi penuh. Untuk prinsip ringkas dari rangkaian ini, berawal dari resistansi yang tingi akan menyebabkan adanya arus yang menglir ke dalam sensor water, lalu delay hingga batas sensor water yg telah ditentukan. ketika air terdeteksi penuh, buzzer akan berbunyi, dan langsung ditangkap oleh sound sensor, sehingga berlogika 1, dan menyebabkan relay berpindah posisi, sehimhha motor berhenti memompa air.
UART adalah jenis komunikasi yang digunakan pada simulasi rangkaian ini. Pada simulasi rangkaian ini juga mempunyai kekurangan yaitu tidak bisa menghidupkan pompa air secara otomatis, tetapi hanya bisa mematikan pompa air secara otomatis.
8. Link Download[back]
Rangkain Simulasi Proteus[download]
Program Arduino Master [download]
Program Arduino Slave [download]
Video Simulasi Rangkaian[Download]
Library Sound Sensor [download]
Library Water Sensor [download]
Data Sheet Arduino[download]
Data Sheet Water Sensor[download]
Data Sheet Sound Detector [download]
HTML [download]
Tidak ada komentar:
Posting Komentar